
ベラ ジョン カジノ 再 登録k8 カジノぶつからない“自動運転ロボットの群れ”アルゴリズム ノースウェスタン大が開発仮想通貨カジノパチンコ2021 年 パチンコ 業界
パチンコ 花 の 慶次 新台 動画k8 カジノ Innovative Tech:
1xbet букмекерская контораこのコーナーでは、テクノロジーの最新研究を紹介するWebメディア「Seamless」を主宰する山下裕毅氏が執筆。新規性の高い科学論文を山下氏がピックアップし、解説する。
米ノースウェスタン大学の研究チームが開発した「Shape Formation in Homogeneous Swarms UsingLocal Task Swapping」は、自動運転車や倉庫で使われる自動搬送ロボットの車両同士が群れで動くときに衝突を回避する分散アルゴリズムだ。
 実験で使用した100台のロボット
実験で使用した100台のロボット
衝突回避の実証をするため、コンピュータシミュレーションで1024台、実機で100台のロボットを使い実験した。実験では各ロボットに目標地点の割り当てと目標地点への衝突のないパスの作成を命令し、衝突せず指定した形状を形成できるかテストする。
 実験で使用したロボット群を上から見た画像
実験で使用したロボット群を上から見た画像
この分散アルゴリズムでは、各ロボットは近隣のローカル情報を用いて自律的に衝突とデッドロックを回避し、群れで動いても自己判断でミッションをクリアするよう設定する。
各ロボットはセンサーを用いて近隣と通信し、行きたいスペースが空いているか判断。空いていれば移動、空いていなければ待機を繰り返し、ミッションクリアまで動作し続ける。近隣との通信範囲は0.6m。実験の結果、1分以内に全ロボットが移動して指定の形状を形成することに成功した。
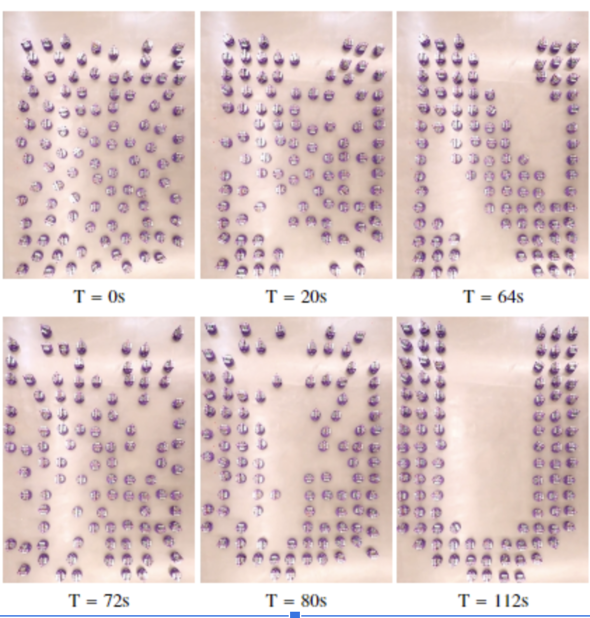 (上段)ロボットが移動し目的の「N」字型を形成(下段)ロボットが移動し目的の「U」字型を形成
(上段)ロボットが移動し目的の「N」字型を形成(下段)ロボットが移動し目的の「U」字型を形成
このように、分散アルゴリズムを用いてロボットの群れを制御することで、集中型制御では困難なスケール化が容易になり、1台の故障でシステム全体をクラッシュさせるリスクを回避できるなどのメリットを享受でき、大量のロボット制御を安全に行える。
仮想通貨カジノパチンコ東京 オリンピック サッカー 代表
関連記事











